Crowdly
Додати до Chrome
2025/2026-1-денна (м)-Теорія оптимальних систем автоматичного керування-Хісматулін В.Ш. керування
Шукаєте відповіді та рішення тестів для 2025/2026-1-денна (м)-Теорія оптимальних систем автоматичного керування-Хісматулін В.Ш. керування ? Перегляньте нашу велику колекцію перевірених відповідей для 2025/2026-1-денна (м)-Теорія оптимальних систем автоматичного керування-Хісматулін В.Ш. керування в do.kart.edu.ua.
Отримайте миттєвий доступ до точних відповідей та детальних пояснень для питань вашого курсу. Наша платформа, створена спільнотою, допомагає студентам досягати успіху!
На рисунку наведені логарифмічні частотні характеристики розімкненої САУ. Визначити орієнтовне значення величини перерегулювання: 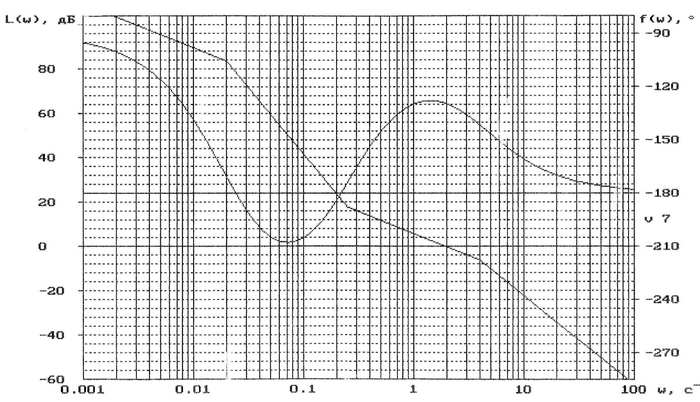
❌
❌
❌
❌
✅
Переглянути це питання
Визначте за графіком час регулювання у секундах.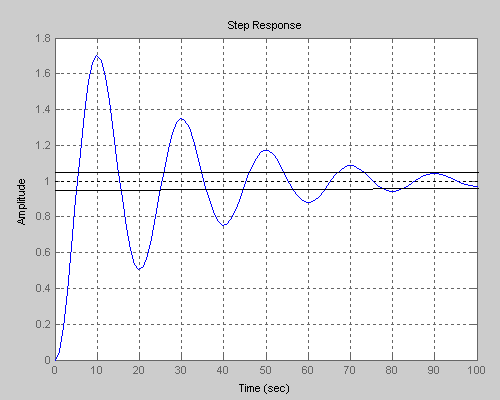
Переглянути це питання
Величина перегулювання є:
❌
❌
✅
❌
❌
Переглянути це питання
✅
❌
❌
❌
❌
Переглянути це питання
На рисунку наведені логарифмічні частотні характеристики розімкненої САУ. Вказати, чому система стійка за критерієм Найквіста 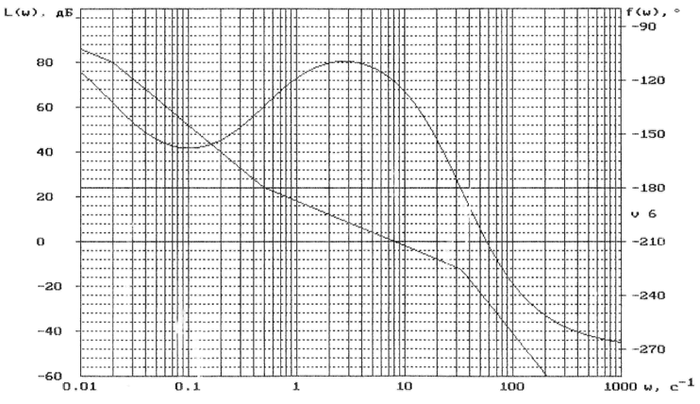
❌
❌
❌
❌
✅
Переглянути це питання
Величина перерегулювання залежить від частоти зрізу:
✅
❌
❌
❌
❌
Переглянути це питання
Визначте за графіком розмір перерегулювання у %.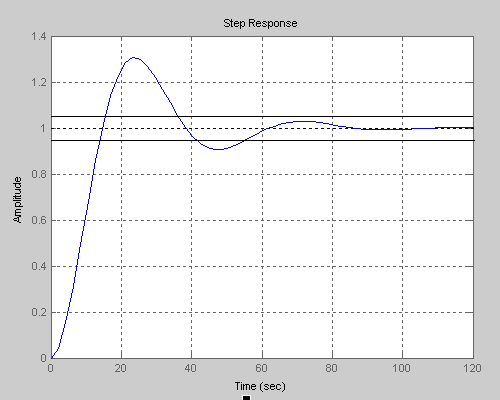
Переглянути це питання
Для задовільної якості функціонування в перехідному режимі необхідно, щоб запаси стійкості відповідали умовам:
❌
❌
❌
✅
❌
Переглянути це питання
Відомо, що непогодження системи дорівнює z(t) = exp(-t*K)*1(t) , а його перетворення Лапласа  . Вказати значення лінійної інтегральної оцінки.
. Вказати значення лінійної інтегральної оцінки.
❌
❌
✅
❌
Переглянути це питання
До яких систем може застосовуватись квадратична інтегральна оцінка?
✅
❌
❌
Переглянути це питання